-
E-mail
ianvan@126.com
-
Telefone
13510091816
-
Endereço
Edifício B2, 4, Emperador Indo Industrial Zone, Rua Guanlan, Longhua New District, Shenzhen
Categorias do produto
Shenzhen Tianyun Automação Tecnologia Co., Ltd.

Máquina automática de ajuste visual duplo em uma única estação
NegociávelAtualização em02/18
- Modelo
- Natureza do fabricante
- Produtores
- Categoria do produto
- Local de origem
Visão geral
Máquina automática de ajuste visual duplo em uma única estação
Detalhes do produto

Detalhes do produto:
Características do produto:
· Dividido em duas partes de ajuste e ajuste automático, os dois sistemas são estreitamente combinados para melhorar significativamente a eficiência.
· Filme de dupla estação e pode colocar vários materiais em uma estação aumentando o sensor.
· Sem necessidade de molde oposto, carregamento automático.
· Sistema automático de contraposição CCD para garantir a precisão da produção.
· Pode armazenar diferentes modelos de fórmulas de produtos arbitrariamente para facilitar o próximo uso direto.
Uma interface de operação de computador superior e uma interface de operação de tela táctil para simular várias ações de produção e operação simples.
A compensação em todas as direções é ajustável, economizando tempo de ajuste e facilitando ajustes sutis.

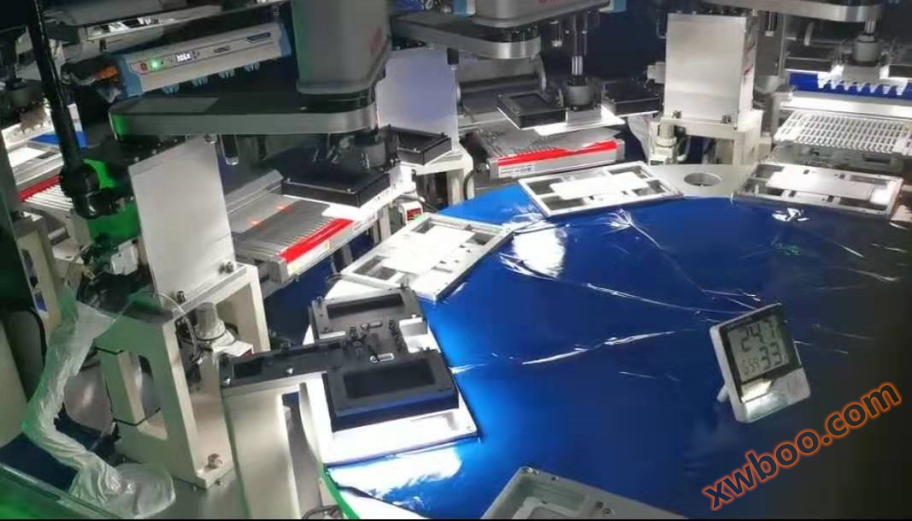
Princípio adequado:
As duas imagens acima foram tiradas por uma câmera, sugada sobre o robô, e as duas imagens abaixo foram tiradas por outra câmera, sobre o cinto.
Nosso software permite que as duas câmeras estabelecam uma conexão única através da calibração entre as câmeras e, em seguida, permite que a membrana e a carcaça se encaixem completamente através da compensação reguladora, de modo que cada ajuste de material posterior seja ajustado com base nesta conexão através do reconhecimento da câmera para controlar a posição de ajuste manual para garantir a precisão da ajuste.
Parâmetros do produto:
· Plataforma de hardware: Controlador industrial de classe industrial + controlador quadruple + câmera de rede gigabit
• Precisão: ± 0,05 mm.
Número de CCDs: 2/4/6/8. (Escolha de acordo com o pedido, quanto mais câmeras, maior a precisão)
· Método de ajuste: a carcaça é transportada automaticamente pelo cinto para a posição especificada, e o robô pega o material para tirar fotos de ajuste.