-
E-mail
hengleyiqi@163.com
-
Telefone
18340091069
-
Endereço
Rua Xie, Distrito Central, Jinan, província de Shandong
Categorias do produto
- Fadiga do carro
- Banco de teste estrutural
- Sistema de teste de carga de truss de aço
- Dispositivo de ensaio de mecânica estrutural multifuncional
- Sistema de suporte anti-força
- Máquina de teste de fadiga pulsante
- Sistema de carga mecânica
- Materiais semelhantes
- Servo elétrico
- Máquina de teste de fadiga inversa
Jinan Hengle Xingche Instrumentos Co., Ltd.



Sistema de teste de retenção de recuperação espacial-JZXT
NegociávelAtualização em11/20
- Modelo
- Natureza do fabricante
- Produtores
- Categoria do produto
- Local de origem
Visão geral
Sistema de teste de retenção de reciclagem espacial-JZXT$r$n$r$n Sistema de teste de retenção de palos de reciclagem de foguetes-HJHS01$r$n$r$n Dispositivo de teste de retenção de reciclagem espacial-HLZZ$r$n$r$n Sistema de retenção de reciclagem de foguetes-Hengli Instruments$r$n$r$n Sistema de teste de retenção de palos de reciclagem de foguetes$r$n$r$n Sistema de teste de retenção de palos de reciclagem de foguetes
Detalhes do produto
Sistema de teste de retenção de recuperação espacial-JZXT
Sistema de teste de pinças de palos de reciclagem de foguete-HJHS01
Dispositivo experimental de retenção de recuperação espacial-HLZZ
Sistema de retenção de recuperação de foguetes - Hengli Instruments
Sistema de ensaio de recolha de foguetes
Sistema de teste de pinças de bastões de reciclagem de foguetes
Dispositivo experimental de recolha de foguetes
Sistema de teste de retenção de recuperação espacial

Sistema de teste de retenção de recuperação espacial-JZXT,Como dois braços robóticos gigantes, eles estão montados em ambos os lados do lançador, como dois "bastões" flexíveis. Ao concluir a missão e retornar ao solo, ele ajusta automaticamente a postura e voa lentamente acima da plataforma de lançamento. No momento em que se aproxima da plataforma de lançamento, o par de braços robóticos estende-se com precisão, como um bastão agarrando um bolinho, segurando cuidadosamente a huojia para deixá-la cair firmemente na plataforma de lançamento, sem precisar que ela pouse com esforço. Este dispositivo é, na verdade, uma "máquina de agarrar bonecas" de alta tecnologia. Ele baseia-se nos seguintes princípios científicos:
(1) Cálculo: o braço robótico deve calcular a velocidade, a direção e a altura do voo do huojian, ajustar a posição oportunamente para garantir que o "bastão" possa pegar o huojian. É como se as "garras" de uma máquina de agarrar bonecas precisassem apontar para a cabeça da boneca.
(2) controle de postura: huojian, ao pousar, precisa ajustar seu ângulo e velocidade, deixando-se lentamente e diretamente "deslizar" para baixo. Assim como você joga basquete, controle bem o ângulo e a força do braço para garantir que a bola entre na cesta.
(3) Sistema de feedback: huojian e braço robótico são equipados com sensores para reagir rapidamente às mudanças ambientais. Uma vez que o huojian se desvia ligeiramente da trilha prevista, o sistema é imediatamente corrigido para garantir que ele se encaixe com o "bastão".
Parâmetros técnicos
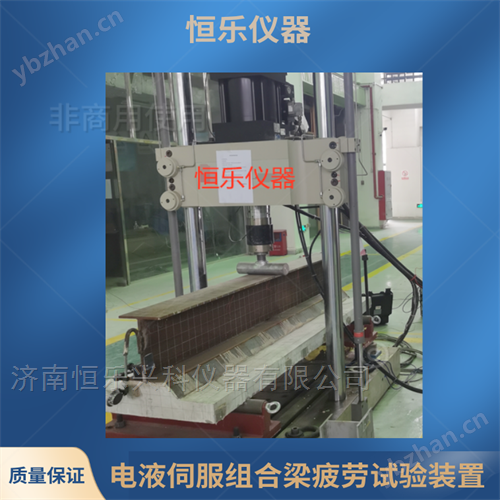
1) Actuador: diâmetro do furo 60mm, design modular.
2) Empurrão nominal do acionador: 500kN;
3) Sensor de carga: sensor de carga radial de roda de alta precisão;
4) Alcance e resolução de medição de carga: 4% - 100% FS, resolução de medição de carga: 0,1 kN;
Precisão da medição da carga: ±1% do valor indicado na faixa de 4% a 100%;
6) Carregamento curso nominal: 200mm;
7) A resolução angular do sensor de inclinação é superior a 0,01 grau;
8) Velocidade nominal do operador: 2,5 mm / s;
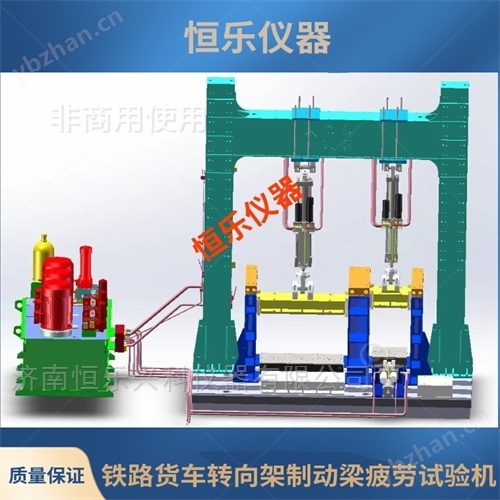
3. Servo-acionador de carga estática
1, 20000kN vertical servo motor de carga, empurrão: 20000kN, tracção: 6000kN; curso: 600mm. (± 300mm);
2, quadro principal unilateral horizontal para o servo elétrico-hidráulico, empurrão 6000kN, tracção 4000kN; curso ± 400mm.
4. Sistema de controle
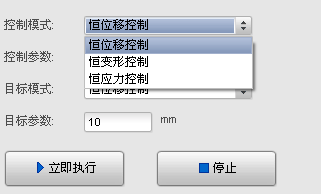
1. software de sistema de controle de carga multifuncional e um conjunto de controladores, as principais funções do software incluem: controle de tensão constante, controle de deslocamento constante, controle de deformação constante, pode definir certas etapas de ciclo. Também é possível realizar a conversão sem impacto entre vários modos de controle para o controle de circuito fechado totalmente automático. O controle do deslocamento, da carga, da tensão e do tempo de manutenção é possível em pelo menos quatro etapas.
As condições finais das etapas experimentais podem ser selecionadas: valor de carga, valor de deslocamento, valor de deformação, valor de tensão, valor de tensão, taxa de decadência de carga, aumento de carga, aumento de deslocamento, aumento de deformação, aumento de tensão, aumento de tensão, valor de carga de decadência, etc., após atingir essa condição, o experimento é parado automaticamente e os dados e as curvas são gravados automaticamente.

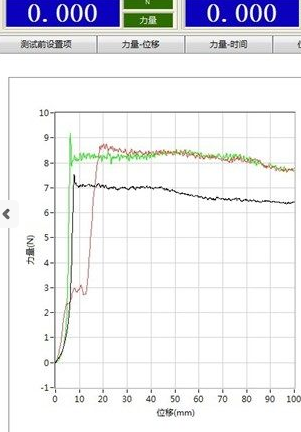
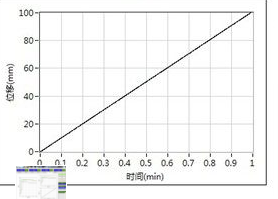
O software tem a função de visualização de dados de teste, o processo de teste é capaz de curvas de tempo em tempo real, curvas de atraso, exibição numérica e animação de vibração estrutural.
A Hengli Xingko adere ao espírito empresarial de "qualidade*", baseado em integridade, inovação científica e tecnológica, com entusiasmo para fornecer aos usuários soluções completas de teste experimental.
A missão da Hengli Xingko: "Perseguir *, revitalizar a ciência e a tecnologia", e trabalhar constantemente para revitalizar a indústria nacional!
Produto semelhante Recomendar